作者:马赫环
能够感知到外界环境,人形机器人才能有更强的行动能力和反应能力。为了让机器人具有更强的行动力,增强其感知能力一直是机器人企业不断追求的目标。
机器人的电子皮肤能够精准感知压力、温度、湿度等多模态信息,是实现精细抓取、柔性交互、安全作业的关键支撑,被视为具身智能的“最后一块感知拼图”。
电子皮肤属于触觉传感器的一种,是具有仿生性的柔性触觉传感器,模拟生物皮肤触觉感知机制,早在2000年前后,触觉传感相关技术研究就已起步。2020年左右,电子皮肤基于相关技术成熟的原因开始进入高速发展期。
电子皮肤旨在赋予传感器模拟天然皮肤功能,能够感知压力、温度等环境刺激,为了覆盖机器人的类人表面和活动的关节部位,电子皮肤阵列触觉传感器通常还必须具有柔韧性与弹性,行业壁垒较高。
电子皮肤从无到有 众多企业纷纷抢占赛道
电子皮肤一般由电极、介电材料、活性功能层和柔性基材等组分构成。当一定的外部条件刺激到电子皮肤时,活性功能层将应变、温度等信号转换为可以检测的电信号,然后电极层接受并传输这些电信号到数据处理模块以及显示终端。
这两年,电子皮肤在人形机器人上从无到有。特斯拉2023年发布的第一代机器人没有触觉装置,Optimus Gen2五根手指的末端各安装了一块电子皮肤传感器。现在的电子皮肤主要用在灵巧手终端,用于感知物体和做出精细动作,行业认为之后电子皮肤将覆盖至全身各部位。
由于市场普遍存在着应用到全身的预期,因此电子皮肤赛道吸引了诸多国内厂商布局,除了福莱新材等上市企业外,包括帕西尼感知、他山科技、赛感科技等未上市公司同样入局。
比如成立于2023年6月的赛感科技,专注新一代高性能柔性触觉传感器、机器人电子皮肤的研发、生产与销售。其技术源自南方科技大学超柔性电子学实验室,在材料、结构、器件、系统上全链条关键技术创新,产品具备高灵敏、大量程、快响应、高线性等优势,广泛应用于人形机器人、消费电子、汽车电子、医疗健康、AI玩具等领域。
赛感科技核心产品为离电式电容传感器,与传统压阻式、电容式传感器相比,这一技术路径实现了高灵敏度与大量程的统一,能够感知从克级到数十公斤级的压力变化,同时保持毫秒级的响应速度。
融资方面,赛感科技目前完成了三轮融资,最新一轮融资为2025年9月宣布的“Pre-A+”轮融资。本轮融资由深圳爱施德智城产业投资并购合伙企业(有限合伙)与深圳市稳正资产管理有限公司共同投资,资金将主要用于新一代柔性触觉传感器的研发迭代、规模化产线建设以及多行业市场应用的深度拓展。
从指尖到全身:电子皮肤92亿元市场空间的几何级增长
电子皮肤赛道形成规模化市场时间不久,目前其在人形机器人市场中主要应用于灵巧手,虽然诸多企业入局,但也充满太多的不确定性。
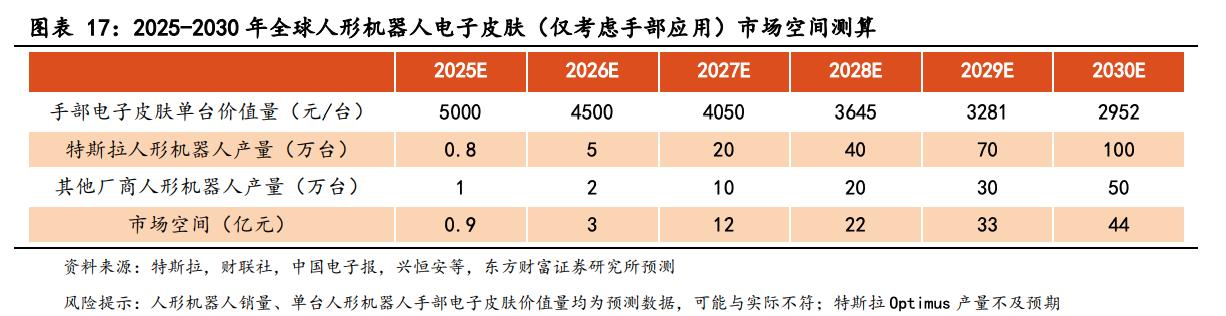
利好方面,是电子皮肤的预期市场规模会迎来爆发式增长,主要原因在于电子皮肤的覆盖面增加。东财研报显示,假设2030年特斯拉人形机器人产量达100万台,其他厂商人形机器人产量合计达50万台,以及单台人形机器人手部电子皮肤价值量为5000元,预计2030年全球人形机器人电子皮肤(仅考虑手部应用)市场空间达44亿元。
灵巧手对于电子皮肤的要求最为精细,需要精确感知抓取的力度、触感和物体形状,使机器人能够细致地操作物体,避免过度用力或损坏物品。
但用于手臂、脚部、躯干和脸部的电子皮肤要求又截然不同。手臂的皮肤要监测运动状态、力量分布和负载,能确保机器人在执行抓取、搬运或协调动作时,避免关节过度受力,提升稳定性和安全性。
脚部的皮肤需要感知地面情况和压力变化,帮助机器人在不同地面上行走时保持平衡并调整步态,提升机器人在复杂地形中的稳定性和自适应能力。面部皮肤则更重视与人类的情感互动效果。
单个手掌的皮肤面积大概只占到人体体表总面积的1%,如果将应用范围扩展到全身,则相关产品市场将会迎来几何级数提升。根据中南大学湘雅医院数据,成人皮肤表面积约为1.7平方米,同时假设2025-2030年,机器人身体使用电子皮肤的面积占全身体表面积的比例提升到25%,再叠加上述机器人产量,预计2030年全球人形机器人电子皮肤(除手部外的部位)市场空间达48亿元。
因此,预计2030年电子皮肤的市场空间或达到92亿元。
电子皮肤繁荣背后的问号:技术路线未收束的选择困难症
电子皮肤相关市场的不确定性也同时存在,这方面主要影响因素为技术路线未收束。
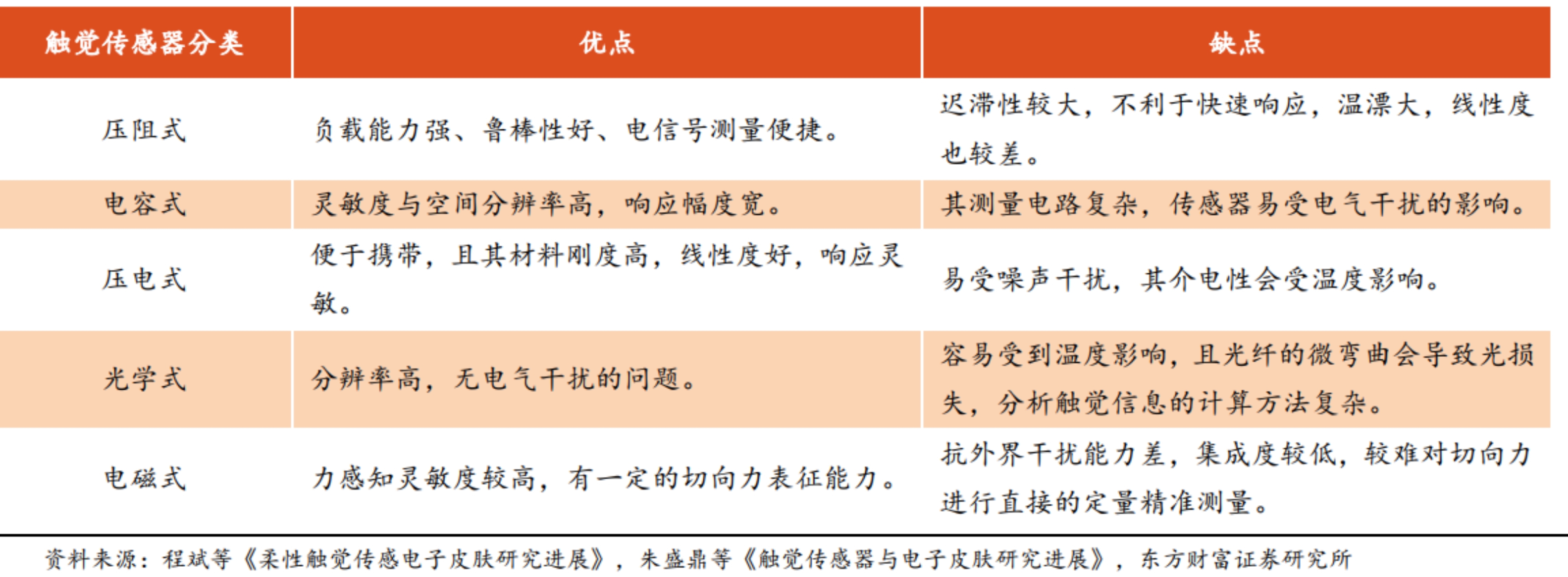
头豹研究院发布的《中国电子皮肤行业概览:机器人的触觉革命》报告称,电子皮肤(柔性触觉传感器)目前主要的技术路线分为电容式、压阻式、压电式和光学式。
电容式是通过测量电容器的电容量变化来检测压力变化。压阻式则是基于半导体材料的压阻效应,压电式利用的压电材料的特性,在受力时产生电荷,即正压电效应。光电式材料则如利用光的干涉、吸收或散射原理来检测压力或形变引起的光学性质变化。
东财研报中提及,电子皮肤中还包括电磁式(霍尔效应传感器)的技术路线。
上述每个路线的产品在当前的优劣势均极为明显,电磁式的优点是力感知灵敏度较高,有一定的切向力表征能力;缺点是抗外界干扰能力差,集成度较低,较难对切向力进行直接定量精准测量。
电容式测量范围广、分辨率可达微米级、动态响应特性好、结构简单、耐高温和辐射,但缺陷是灵敏度较低,易受环境因素如温度、湿度影响;边缘效应和寄生电容可能影响测量精度
研究称,柔性触觉传感器需要良好的柔韧性及灵敏的压力感应功能,压阻式路线凭借相对简单的工艺及较低的成本成为当前的主流路线,有望率先实现放量。
过多的技术路线同时存在,尽管在宏观形势上营造出一片勃勃生机万物竞发的繁荣景象,但在现实中会不可避免的增加企业的布局成本,技术路线不能迅速收束,将直接影响到加工技术、人才培养、材料工艺等多方面。
如之前的赛感科技,与他山科技主要偏向于自研的电容式路线,福莱新材更偏向于压阻式路线,在很大程度上来说,同时存在太多的技术路线,造成了下游核心零部件厂商的选择困难症,增加了试错成本。
诚然,机器人电子皮肤市场已经处在了爆发前夜,但必然激增的市场和最终的成熟生态之间,还存在着由技术画出的一个个问号。